1.
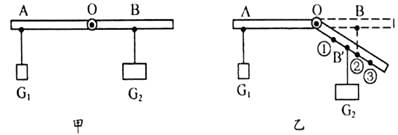
某实验小组用飞镖的镖盘做了一个圆心固定且可以绕圆心O转动的圆盘,圆盘的直径上AB两端各有1个平衡螺母,A、B、C是在镖盘以O为圆心的同一个圆上的三个点,BD垂直于AB , 接下来用这个装置探究杠杆力臂的具体概念;
①调节圆盘两端的平衡螺母让A、B在水平位置平衡;
②在圆盘A点挂两个钩码(总重1牛),B点挂两个钩码,杠杆平衡,再将B点的两个钩码分别挂在C
点和D点,结果挂在D点时杠杆能保持平衡,挂在C点时杠杆不能平衡;

(1)
步骤①之前,若A比B低,为使AB在水平位置平衡,平衡螺母应向调节;(选填“左”或“右”)
(2)
通过实验发现影响杠杆平衡的是支点到的距离,科学上将这个距离定义为力臂;(选填“力的作用点”或“力的作用线”),但另一小组认为,这样得到力臂概念不够严谨,存在的问题是。
(3)
已知OE=2/3OA,那么取下右侧两个钩码后,若小明想用弹簧测力计作用在C点竖直向下拉,使杠杆再次平衡,则弹簧测力计的示数为牛。
【考点】
杠杆的平衡条件;
力臂的画法;
能力提升
真题演练