1.
火车作为我国重要的交通运输形式之一,其轨道的平顺性和稳定性直接影响列车的运行安全.我国目前轨道检测的主要方法是机械检测,通过使用机械传感器和无损检测设备(包括激光三角位移传感器、超声波传感器等)来测量轨道的各种参数(几何尺寸、轨距、高差和曲率),从而判断轨道是否有损伤或缺陷.某校科创活动小组率先就“激光三角位移计”这一设备开展了学习与探究:
阅读概述 | 激光三角位移计是由半导体激光向目标物照射激光,聚集目标物反射的光,并在光接收元件上成像.一旦离目标物的距离发生改变,聚集反射光的角度也会改变,成像的位置也随之改变.可以通过成像的位移来计算物体实际的移动距离.
|
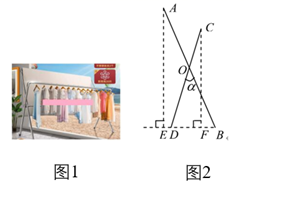
发现原理 | 被测量物体从初始位置移动到最终位置,需要测量的是参考平面与目标测量平面的距离,也就是图中点
|
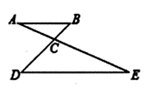
建立模型 | 如图,直线
|
探究(1) | 设 |
探究(2) | 已知 |



【考点】
相似三角形的判定与性质;
解直角三角形的其他实际应用;
基础巩固
能力提升
变式训练
拓展培优
真题演练