1.
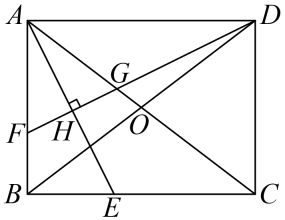
图1是一款高清视频设备.图2是该设备放置在水平桌面上的示意图, 垂直于水平桌面
垂直于水平桌面 , 垂足为点
, 垂足为点 , 点
, 点 处有一个摄像头.经测量,
处有一个摄像头.经测量, 厘米,
厘米, 厘米,
厘米, .
.

(1)
求摄像头到桌面的距离;
(2)
如果摄像头可拍摄的视角 , 且
, 且 , 求桌面上可拍摄区域的宽度(
, 求桌面上可拍摄区域的宽度( 的长).
的长).
(参考数据: ,
. )
【考点】
相似三角形的判定与性质;
解直角三角形的其他实际应用;
能力提升
真题演练